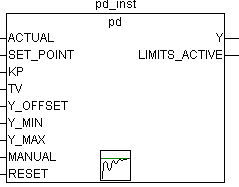
函数库 ⇘ “函数库 UTIL.Library ”提供以下 PD 控制功能块:
功能块输入:
|
变量 |
数据类型 |
描述 |
|---|---|---|
|
ACTUAL |
REAL |
控制变量的当前值 |
|
SET_POINT |
REAL |
描述值,命令值 |
|
KP |
REAL |
比例系数, P-部分的比例增益 |
|
TV |
REAL |
微分时间,以秒定义的 D-部分时间,例如 "0.5" 表示 500 秒 |
|
Y_MANUAL |
REAL |
如果 MANUAL = TRUE 定义输出值 Y |
|
Y_OFFSET |
REAL |
操作值 Y 的偏移值 |
|
Y_MIN, Y_MAX |
REAL |
操作值 Y 的低限制值以及高限制值。如果 Y 到达限制值,输出 LIMITS_ACTIVE 将会被设置为 TRUE 并且 Y 将会保持在制定的范围内。这个功能块只在 Y_MIN<Y_MAX 时工作。 |
|
MANUAL |
BOOL |
如果为 TRUE,手动操作将会被激活,那么输出值将会通过 Y_MANUAL 进行定义。 |
|
RESET |
BOOL |
TRUE 复位控制器;在重新初始化时 Y = Y_OFFSET 。 |
功能块输出:
Y_OFFSET, Y_MIN 以及 Y_MAX 用于在指定的范围内进行操作数的转换。
MANUAL 可以用于启动或者关闭手动操作。 RESET 用于复位控制器。
通常操作 (MANUAL = RESET = LIMITS_ACTIVE = FALSE) 功能块计算 功能块错误 e的方式不同 SET_POINT – ACTUAL,产生时间的相关微分 de/ dt 并将其作为内部变量存储。
输出, 计算值 Y,通过以下方式获得:

所以除了 P-部分以及控制器当前的偏差 (D-部分) 都将会影响计算输出。
另外 Y 限制在 Y_MIN 和 Y_MAX 定义的范围内。如果 Y 处理时到达这个限制值, LIMITS_ACTIVE 将会变为TRUE。如果没有计算的限制值, Y_MIN 和 Y_MAX 必须被设置为 0 。
一旦 MANUAL=TRUE, Y_MANUAL 将会被写入 Y。
一个 P-调节可以通过设置 TV=0 实现。